The first stage of this project is imaginary: is the system capable of being managed by as many processors as there are participants? We know that some mini-processors are relatively fast, have enough memory for basic things, have enough I / O's for basic connections, can be energy intensive, and that they can be found everywhere.
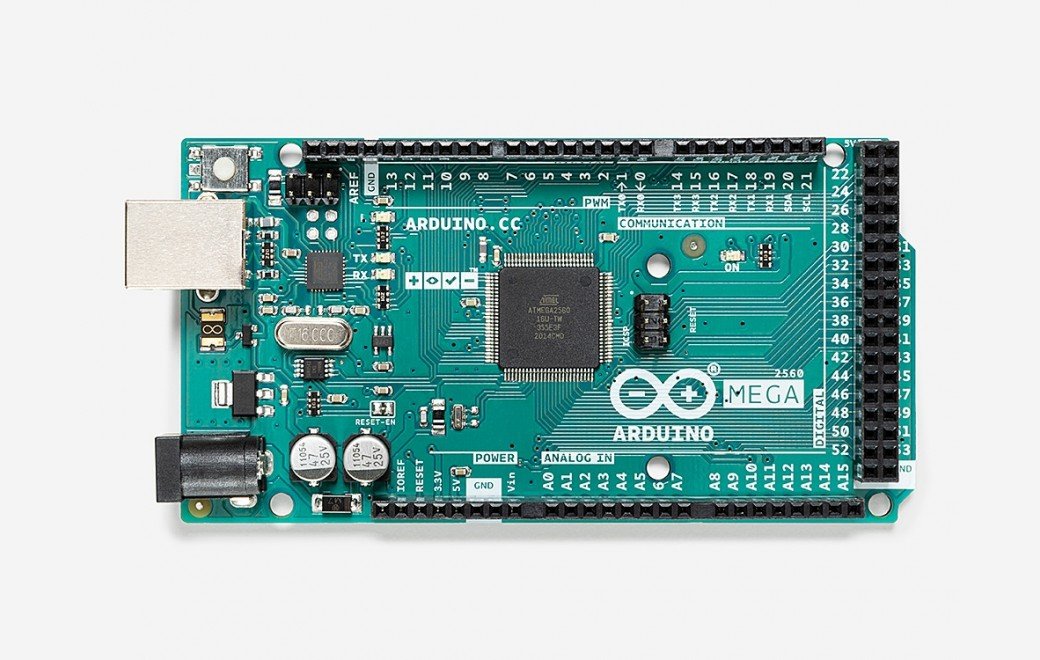
So I made the choice to go to the Arduino ™ processor range.
![]()
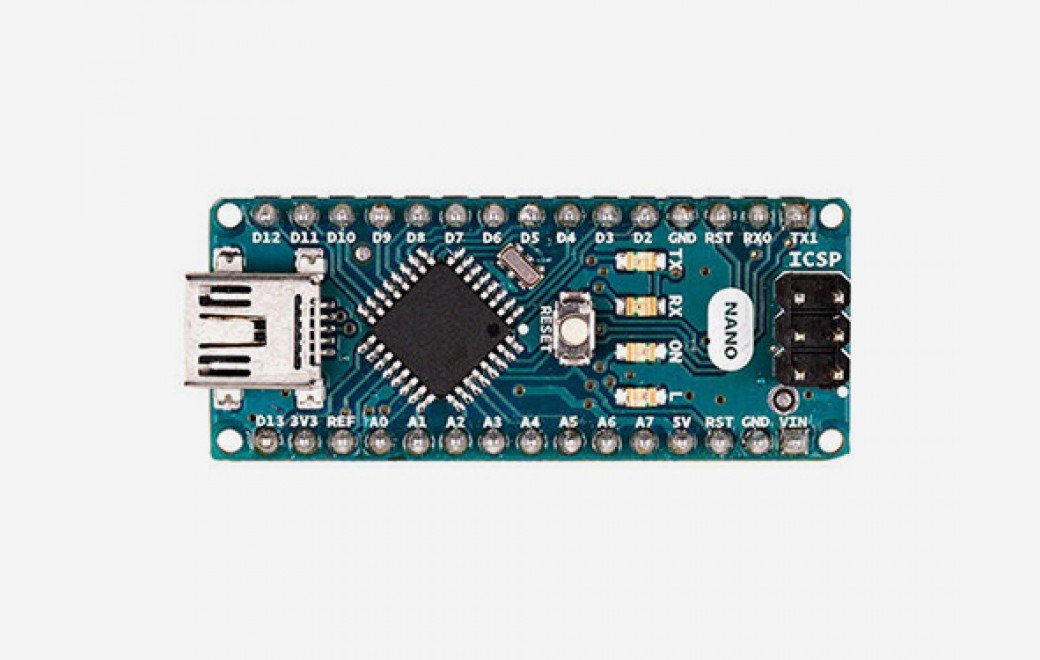
Two models that I had in stock in my "treasures" are the Mega and the Nano. So I started by studying the feasibility of exploiting these elements.
 |
 |
|---|---|
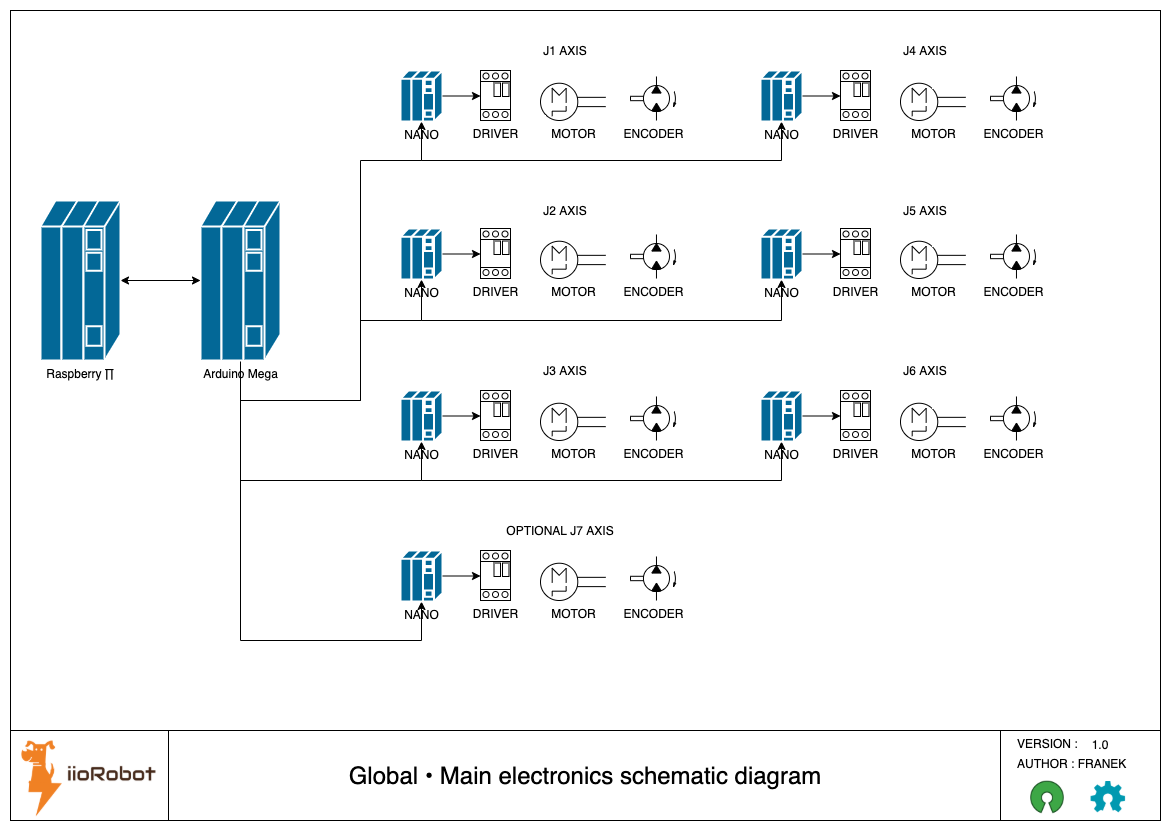
The Mega will serve as a central core, which will manage the local interface with the user, security, communications with the child processors, on the one hand, and on the other hand, will receive its instructions from the outside world, via a another high added value application in terms of GUI.
The Nanos will receive orders from the Mega, all synchronized via a protocol that I will detail later. From these commands, they will position the stepper motors with actual position control via incrementers. These same incrementers will also later make it possible to manage the learning of the robotic arm by recording the movements that would be submitted to them in disengaged mode.
So I started by testing the possible communications between the Mega and the Nanos, and I opted for the I2C protocol.
![]()
We will see in the part concerning the software how the inter-Arduino messages are created.
Here is the logic diagram of the imagined installation :